(w trakcie realizacji)
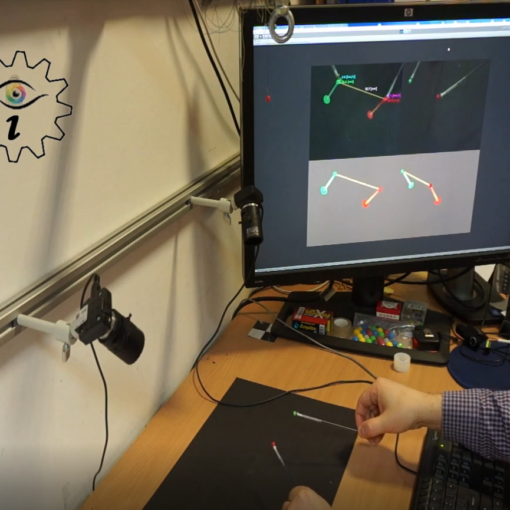
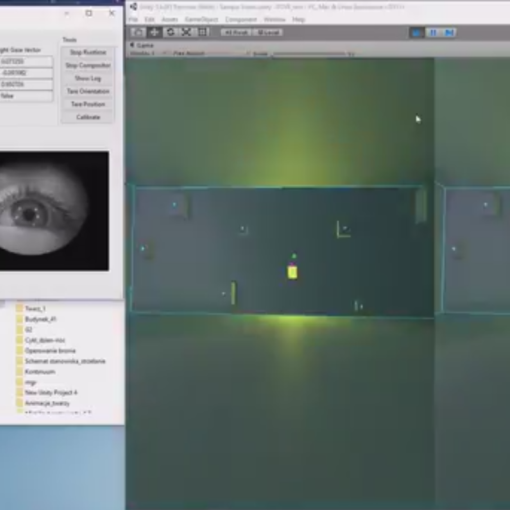
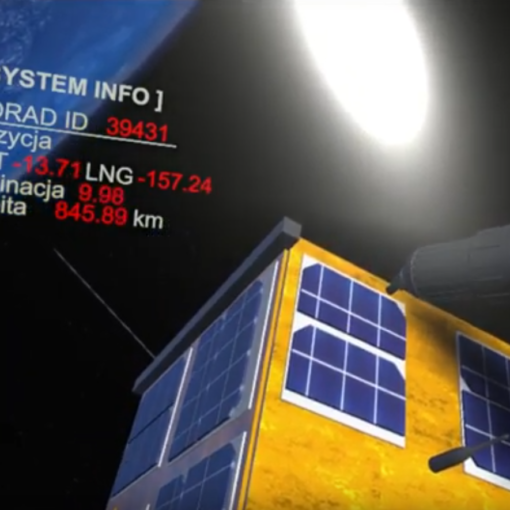
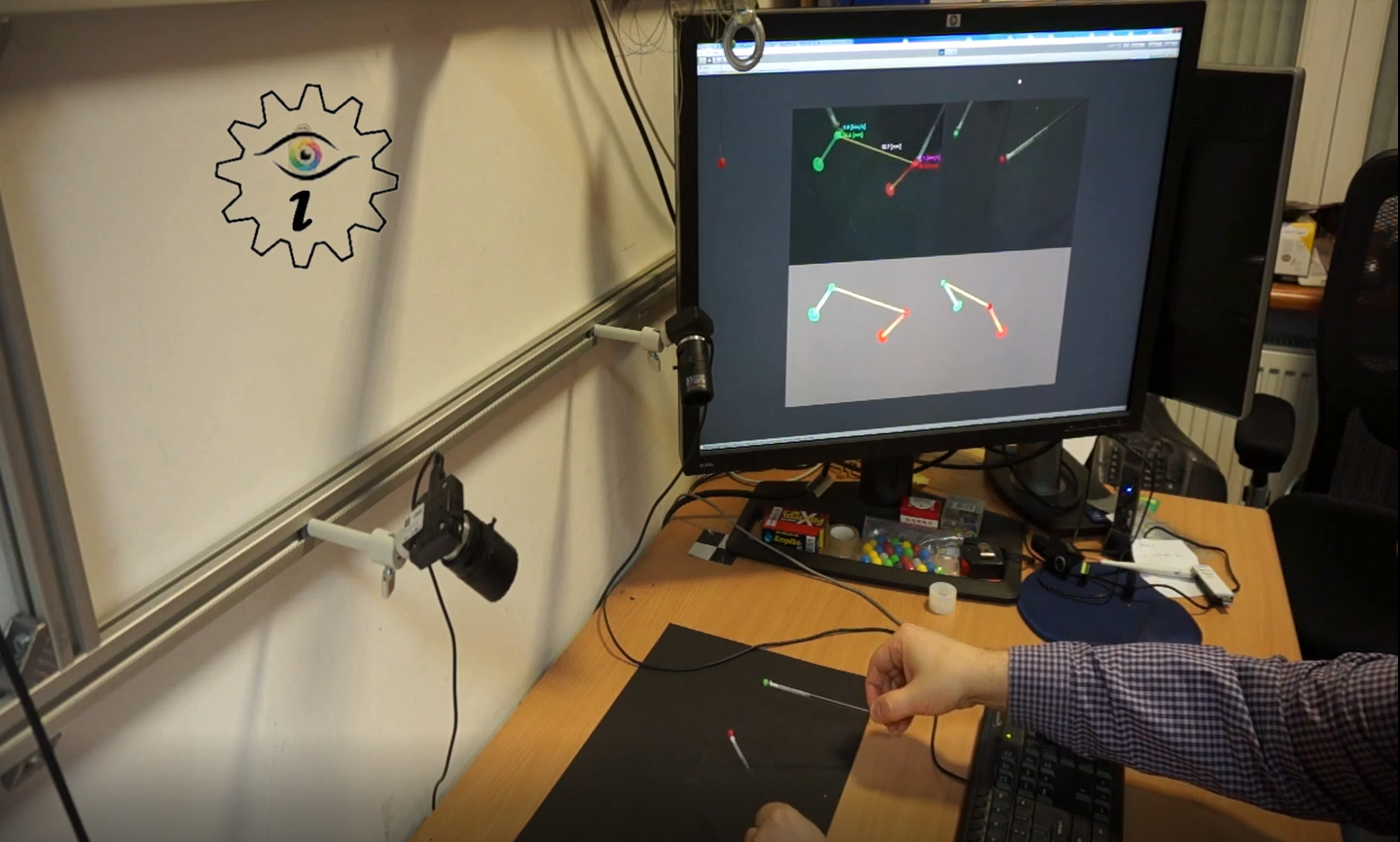
Rozwiązanie demonstrujące możliwości zastosowania środowiska wirtualnego do wizualizacji pracy robota a także analizy możliwości wystąpienia kolizji elementów ruchomych robota z innymi obiektami sceny rzeczywistej zamodelowanych w środowisku wirtualnym



{kind=link}
{kind=link}
{kind=link}
{kind=link}