(in progress)
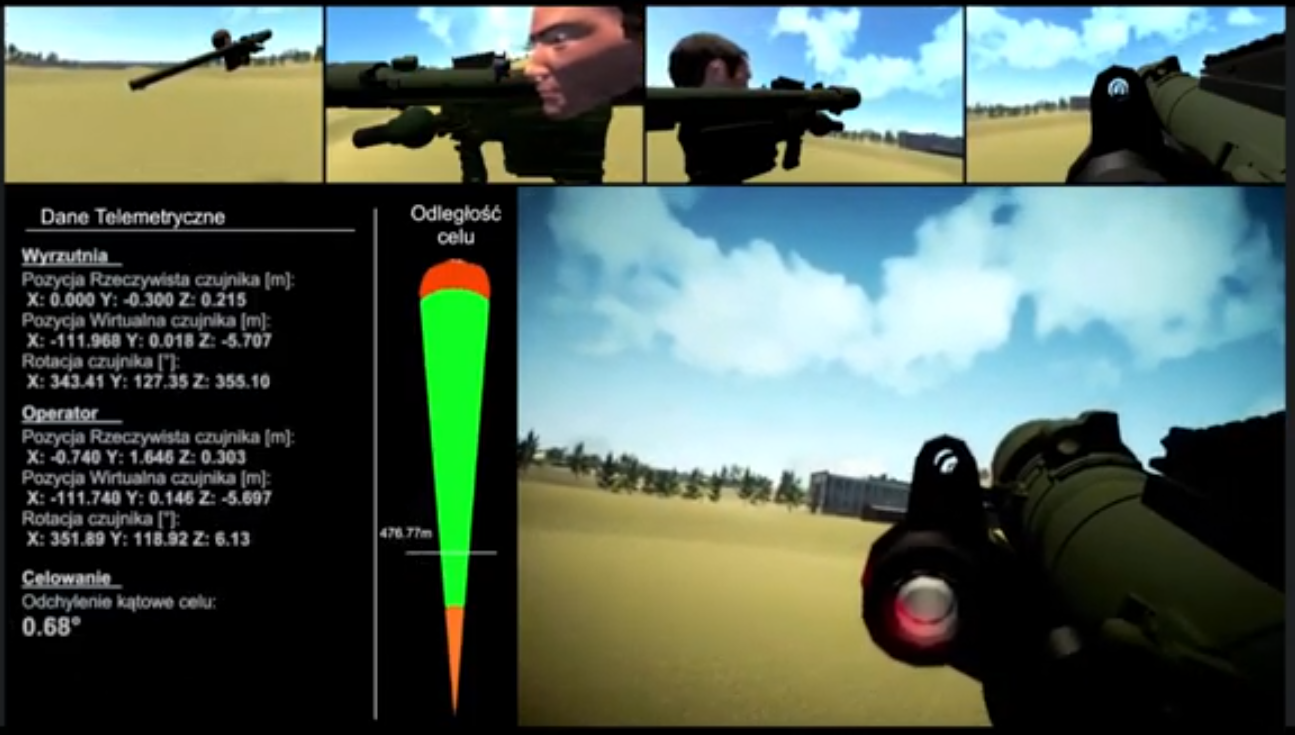
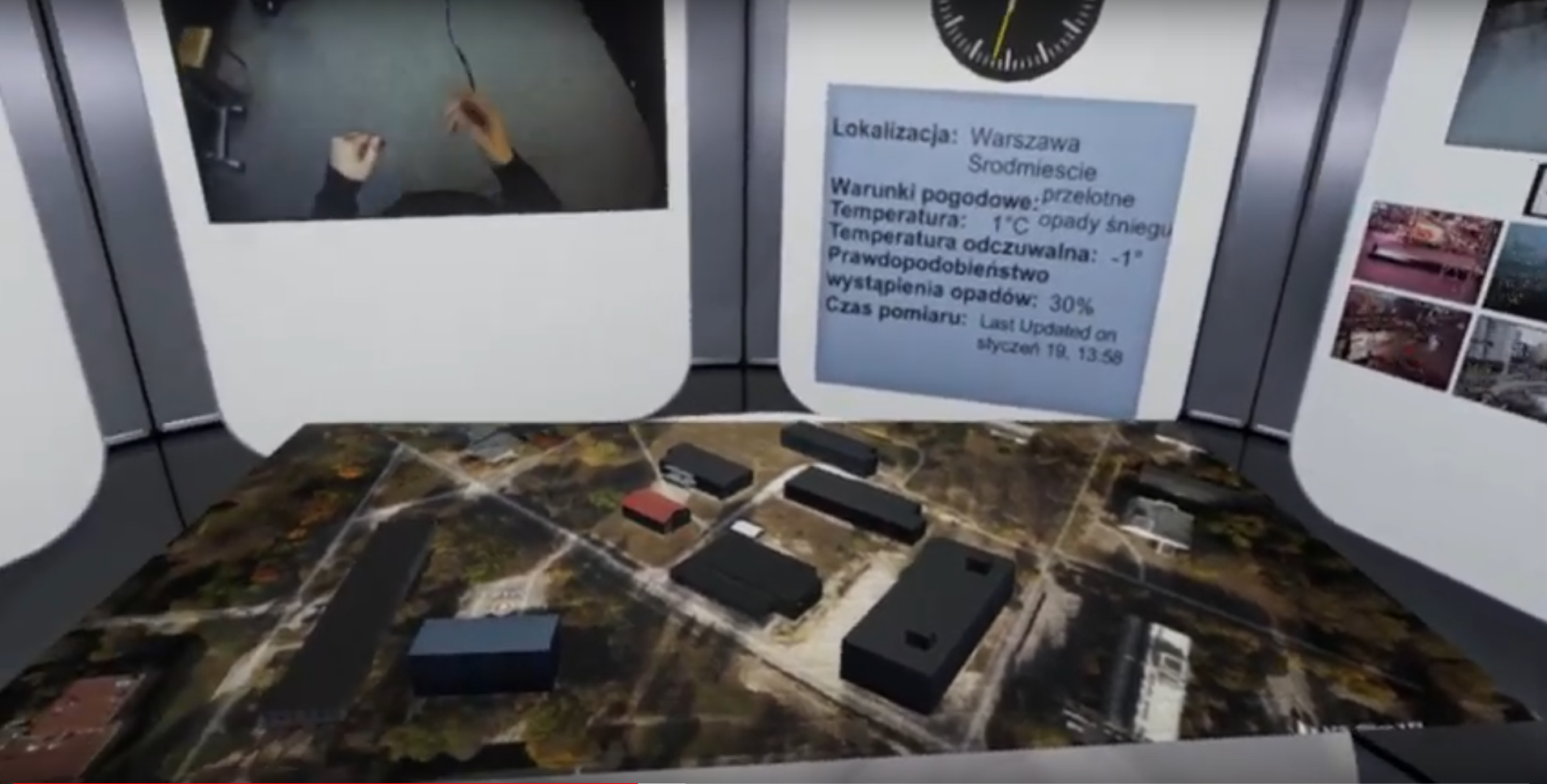
A solution demonstrating the possibilities of using a virtual environment to visualize the work of a robot as well as analyzing the possibility of collisions of robot moving parts with other objects of the real scene modeled in a virtual environment.


{kind=link}
{kind=link}
{kind=link}
{kind=link}